


This discussion paper was developed as part of the collaboration agreement signed by the Istituto Nazionale per l’Assicurazione contro gli Infortuni sul Lavoro (INAIL) with EU-OSHA related to the provision of research services in the area of musculoskeletal disorder (MSD) prevention, and presents results of a joint INAIL/Italian Institute of Technology (IIT) project on collaborative exoskeletons.
In recent years, new assistive devices worn by the worker (exoskeletons) have been introduced in the workplace, wearable robotic devices that will possibly represent one of the next changes in many occupational scenarios (e.g. in economic sectors such as automotive and aerospace manufacturing, logistics, construction and agriculture).
In particular, manual material handling (MMH) is a common physically demanding activity in many occupational contexts (e.g. in economic sectors such as manufacturing, logistics, construction and agriculture). MMH includes tasks such as dynamic lifting and prolonged stooped postures, can generate considerable compressive pressure on the lumbar spine and is one of the main risk factors for workrelated musculoskeletal disorders (WRMSDs).
WRMSDs not only increase the costs sustained by companies but, most importantly, have a severe impact on workers’ quality of life. Safety and ergonomic guidelines for the workplace aim to reduce the workload on workers, often resulting in very strict limitations on MMH operations in terms of object weights and movement frequency.

With the use of technical devices, such as external manipulators, which unload all or part of the weight to be handled, the physical workload on workers can be reduced.
Nevertheless in some circumstances, such devices and other technical and organisational measures to design workplaces can be impractical or infeasible, and therefore it becomes necessary to consider the use of exoskeletons.
The article tries to define the state of the art of occupational exoskeletons and to illustrate what needs must be met and what requirements this typology of exoskeleton must possess in order to maximise the user benefits and minimise potential negative impacts, through a human-centred design (HCD) process.
What are exoskeletons?
Exoskeletons can be defined as personal assistance systems that affect the body in a mechanical way, and are normally classified as active or passive systems. Active exoskeletons use actuators (mechanical drive components) to support human movements. A computer program based on sensor information controls the action of the actuators during operation. In contrast, passive exoskeletons use the restoring forces of springs, dampers or other materials to support human movement. The movements of the user generate the energy stored in a passive exoskeleton.
Furthermore, forces are redistributed to protect specific body regions. The change in user performance results not from additional physical strength but from the ability to maintain exhausting positions over a longer period of time, for example in overhead working conditions.
What is currently meant by ‘robot’ and ‘robotic device’?
International Standard ISO 8373:2012 (ISO, 2012) specifies vocabulary used in relation to robots and robotic devices operating in both industrial and non-industrial environments.
Generally speaking:
1. A robot is an actuated mechanism programmable in two or more axes with a degree of autonomy, moving within its environment, to perform intended tasks. A robot includes the control system and interface with the control system.
2. A robotic device is an actuated mechanism fulfilling the characteristics of robot, but lacking either the number of programmable axes or the degree of autonomy.
The standard classifies robots and robotic devices as:
– industrial applications, which can be either fixed in place or mobile for use in industrial automation applications such as manufacturing, inspection, packaging and assembly;
– service applications, for personal use for a non-commercial task (e.g. domestic servant robot, automated wheelchair, personal mobility assistance robot, pet-exercising robot) or professional service robots used for a commercial task.
This overview helps to introduce the definition and technical characteristics of a device that can be considered an active exoskeleton.For this purpose, the draft standard ISO/CD 18646-4 – Robotics – Performance criteria and related test methods for service robots – Part 4: Lower-back support robots (ISO/CD 2019), defines:
- a wearable robot as a device that provides an assistive force or torque for supplementation or augmentation of personal capabilities while attached to the human during use [wearable robots are referred to as restraint-type physical assistant robots in ISO 13482:2014 (ISO 2014)];
- a lumbar support robot as a wearable robot to reduce the load in the lower back of the user by its assistive force or torque (Figure 1).

Figure 1: Examples of lumbar support robot
Source: XoTrunk – INAIL/Italian Institute of Technology (IIT) project on collaborative exoskeletons
Recently, there has been increasing interest in employing exoskeletons to reduce the physical load on workers carrying out demanding activities in several occupational sectors: these exoskeletons are referred to as occupational exoskeletons.
In general, occupational exoskeletons, like other applications, can be classified into three groups: lower, upper (Figure 2) and full body exoskeletons. These last offer support to the upper body and lower body at the same time (Figure 3).
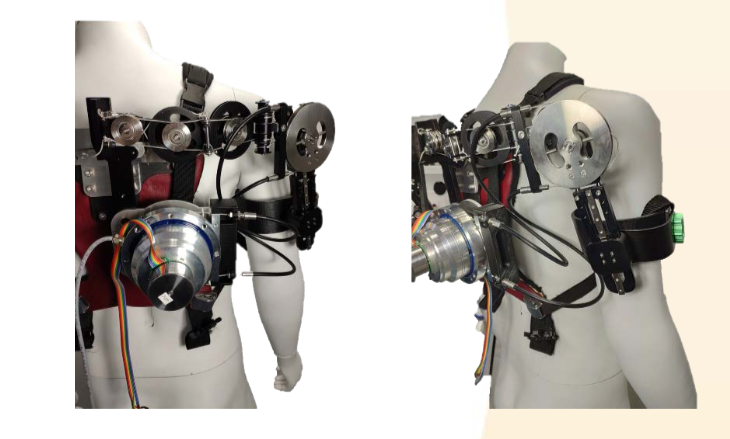
Figure 2: Example of occupational upper active exoskeleton
Source: Park, Ortiz & Caldwell, 2018
Occupational exoskeletons: difficulty of acceptance by workers
Large-scale implementation of this type of exoskeletons has still a long way to go, mainly because there is little knowledge of these wearable service robot devices and their real preventive effects on WRMSDs, and because of some technical and user acceptability issues
For workers wearing occupational exoskeletons (both active and passive), several risk scenarios can be defined relating to their prolonged use (EU-OSHA, 2019).
There are also some technical, safety and ergonomic issues that need to be considered and solved first to imagine large-scale implementation of occupational exoskeletons. One reason might be, for example, the level of discomfort associated with wearing the exoskeleton.
Another concern regarding passive devices is related to the potentially increased activity of leg or arm muscles: the use of anthropomorphic exoskeletons can be helpful to overcome these issues. These exoskeletons have a similar skeletal structure to the human body, involving a series of many actuated joints.

Figure 3: Concept of occupational full body active exoskeleton
Source: INAIL/Italian Institute of Technology (IIT) project on collaborative exoskeletons
The exoskeleton replicates the movements of the worker, but distinguishing intended from unintended movements is often difficult and results in systems with many different kinds of sensors and complex signal processing.
Another concern is that international safety standards for occupational application of exoskeletons do not yet exist. This is a significant barrier to their adoption.
Furthermore, user acceptability is a crucial factor for the real implementation of these devices in the workplace.
Recent publications looking at the barriers to acceptance and utilisation of wearable technology noted that the device must not only be safe, comfortable, useful and usable but, just as importantly, must be desirable to the end user. For this reason, it is advisable to resort to a user-centred design approach to involve the users (companies and workers) directly in the exoskeleton design process.
Source: EU-OSHA
